Immersion Technology Lab
Interaction Design / Physical Computing
2025 Fall
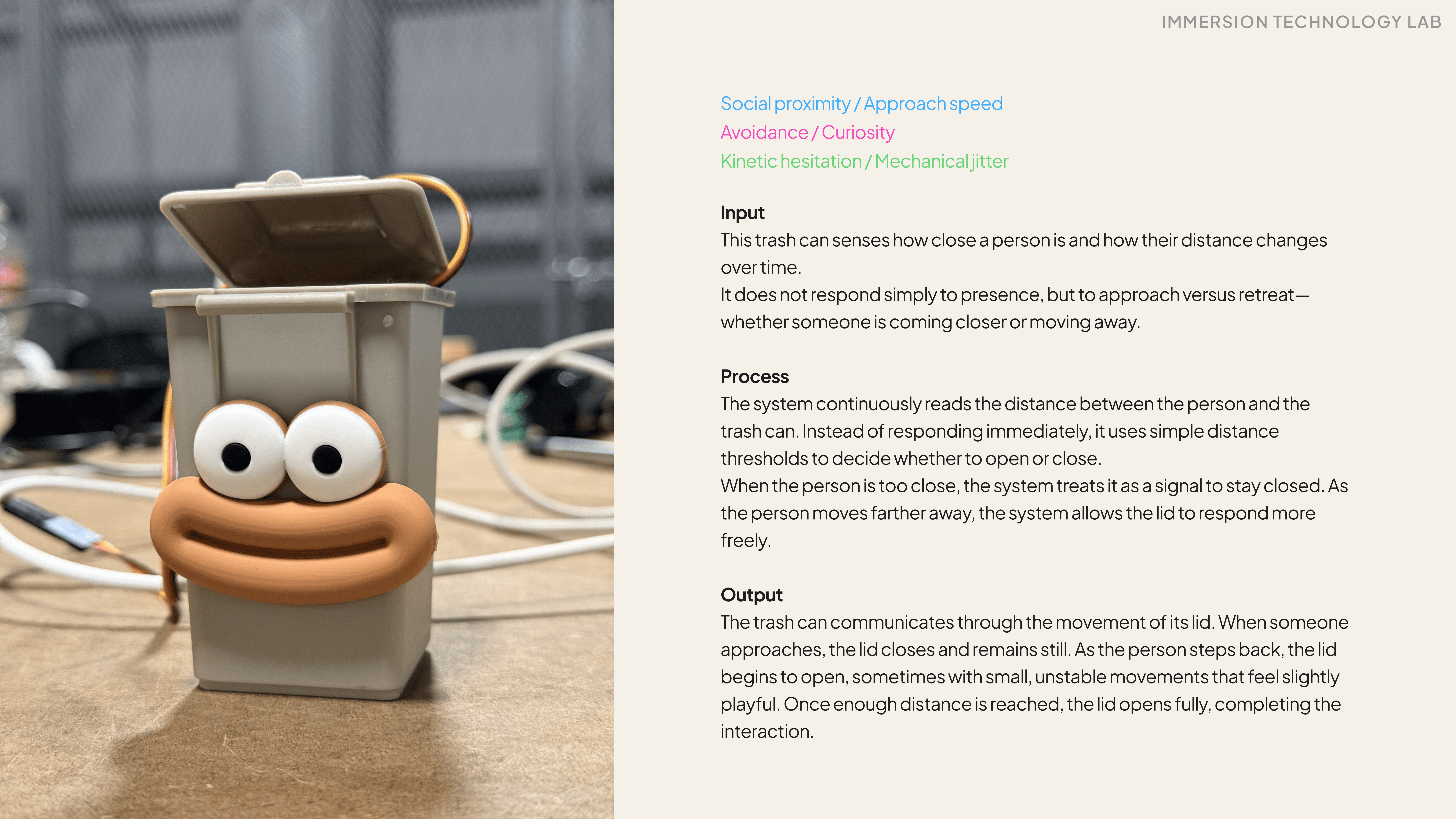
An interactive trash bin that reacts to human proximity with expressive motion. Using an ultrasonic sensor and servo motor, the system maps distance to behavioral states, shifting from open to hesitant to closed as someone approaches.
Through iterative calibration and testing, the project explores how subtle changes in movement can communicate personality and social boundaries in everyday objects.